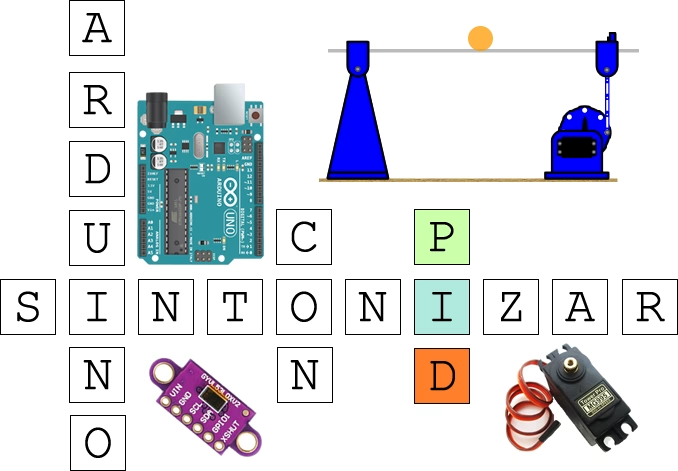
Sintonizar PID con Arduino – Sistema Bola-Viga
Introducción Esta maqueta es un sistema muy empleado en el mundo educativo debido a que posee unas características que la hacen muy interesante de analizar y sintonizar. Una característica interesante es que su respuesta tiene carácter integrador, lo que conlleva recurrir a métodos de identificación en lazo cerrado y solamente eso, ya nos saca de nuestra zona de confort. En este caso implementaremos un control PID pero podemos encontrar por la red controladores más sofisticados como el LQR o el…