PIC16F84 – Control PID
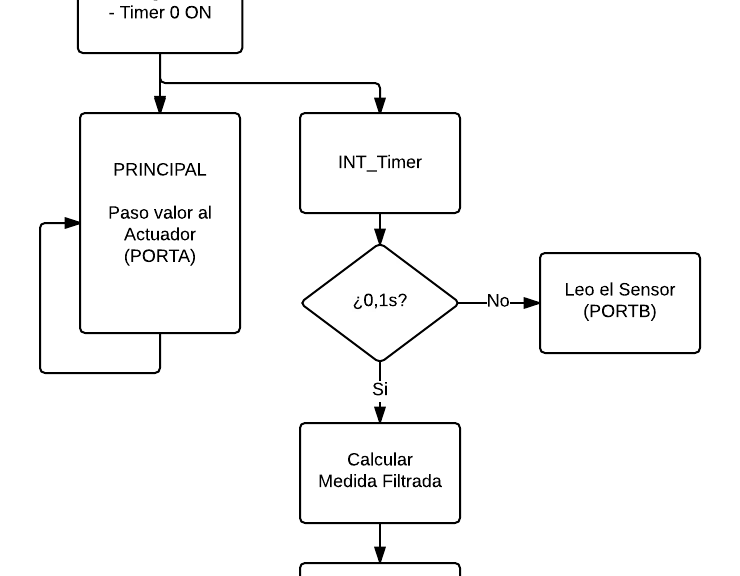
Problema propuesto Emular un Controlador Discreto PID con el PIC16F84. Utilizar una gestión de tiempos con interrupción por temporizador. Se supone que la referencia es un valor interno, Referencia. Para simplificar se supone que el actuador y el sensor manejan la información en complemento a 2. Cada 0.01 debe leer el sensor, LeerPortB. Cada 0.1s debe: Calcular MedidaFiltrada como un promedio de las 8 últimas lecturas del sensor. Se puede realizar la media sumando dos elementos y un desplazamiento a…